I’ve been flying Zax for about two weeks now and noticed some issues:
- Jello effect visible on the high definition camera
- Oscillations or other destabilization while turning or descending
Most of the online suggestions involve PID tuning. For the CC3D flight controller, I am using, I found this wonderful noob-oriented guide: https://forums.openpilot.org/topic/39941-tuning-guide-for-noobs-and-new-builds-optune/
Following the steps I arrived at the following Unique Oscillation Values (UOV) for my specific quadcopter build:
- Roll Rate Kp: 0.00634
- Pitch Rate kP: 0.01142
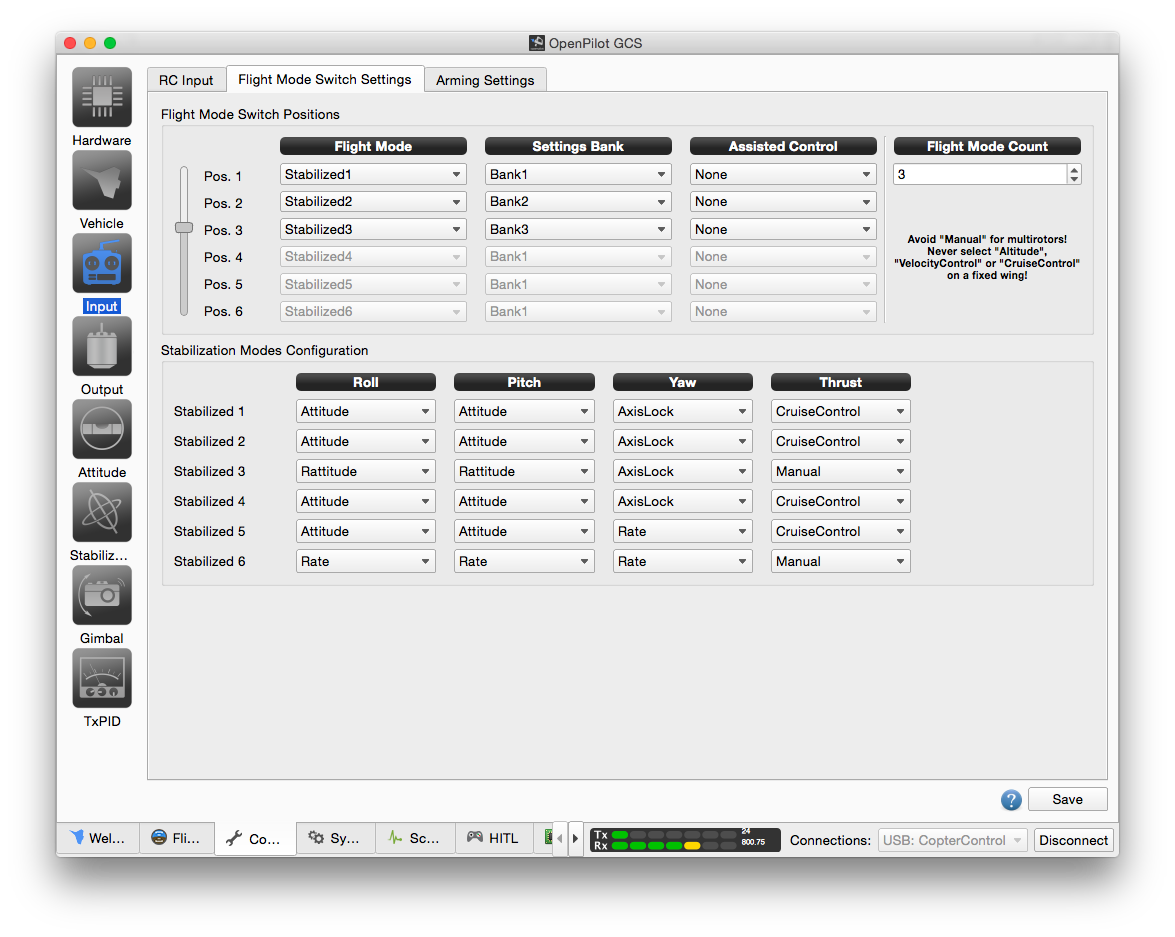
Using the online OPTune calculator (https://optune.opng.org/), I created the following flight modes with my basic PWMSync ESCs:
FM1: Photographer + Soft Yaw
(Roll, Pitch, Yaw)
Kp 0.00348 0.00627 0.00488
Ki 0.00870 0.01568 0.00927
Kd 0.000047 0.000085 0.000041
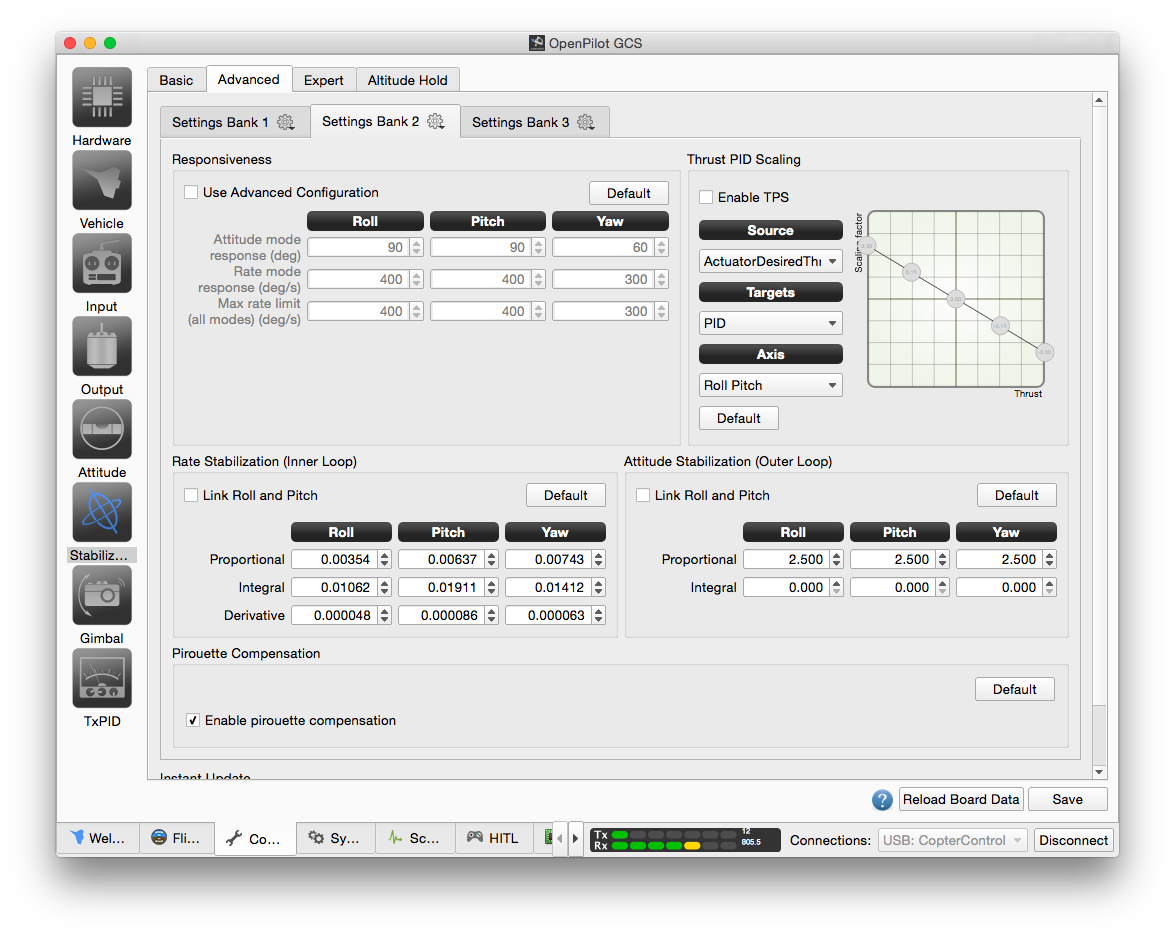
FM2: Cruiser + Gentle Yaw
(Roll, Pitch, Yaw)
Kp 0.00354 0.00637 0.00743
Ki 0.01062 0.01911 0.01412
Kd 0.000048 0.000086 0.000063
FM3: Sport Flyier + Firm Yaw
(Roll, Pitch, Yaw)
Kp 0.00359 0.00648 0.01007
Ki 0.01257 0.02268 0.01913
Kd 0.000048 0.000087 0.000086


I did a quick Line-of-sight test with these values and I can see a substantial improvement. Zax feels a lot more dialed-in, no noticeable wobbles and no Jello on the camera. I’m looking forward to testing it FPV as soon as I can.
Update (9/26/2015) I still experience a bit of oscillations at sharp turns. I decided to bump down the P values by 0.00030 respectively to:
- Roll Rate Kp: 0.00604
- Pitch Rate kP: 0.01112
These values plugged in the calculator on a “Sport Flyer” with “Firm Yaw” produced the following PIDs:
(Roll, Pitch, Yaw)
Kp 0.00342 0.00631 0.00973
Ki 0.01197 0.02209 0.01849
Kd 0.000046 0.000085 0.000083
Hope to do a test run tomorrow.