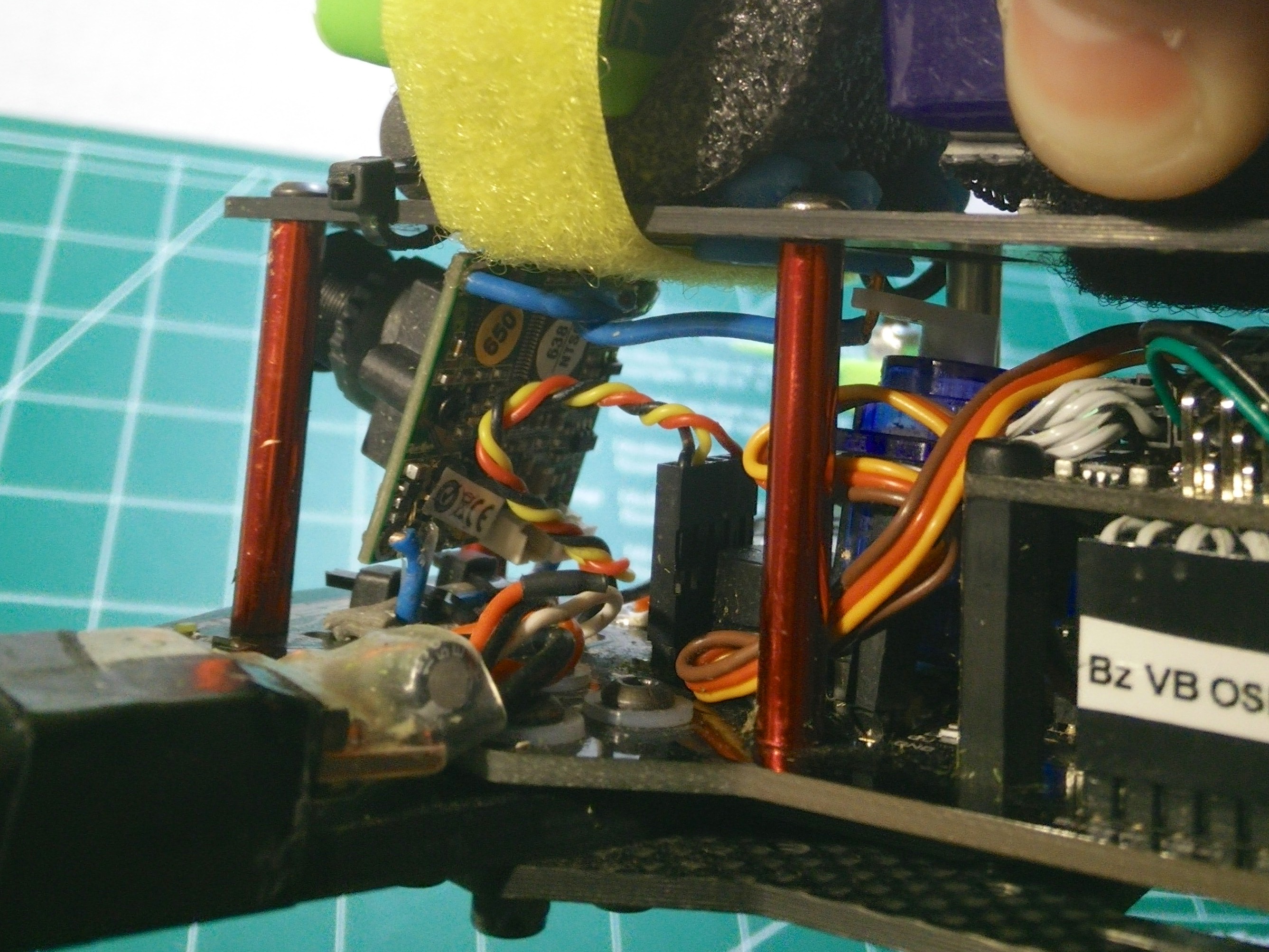
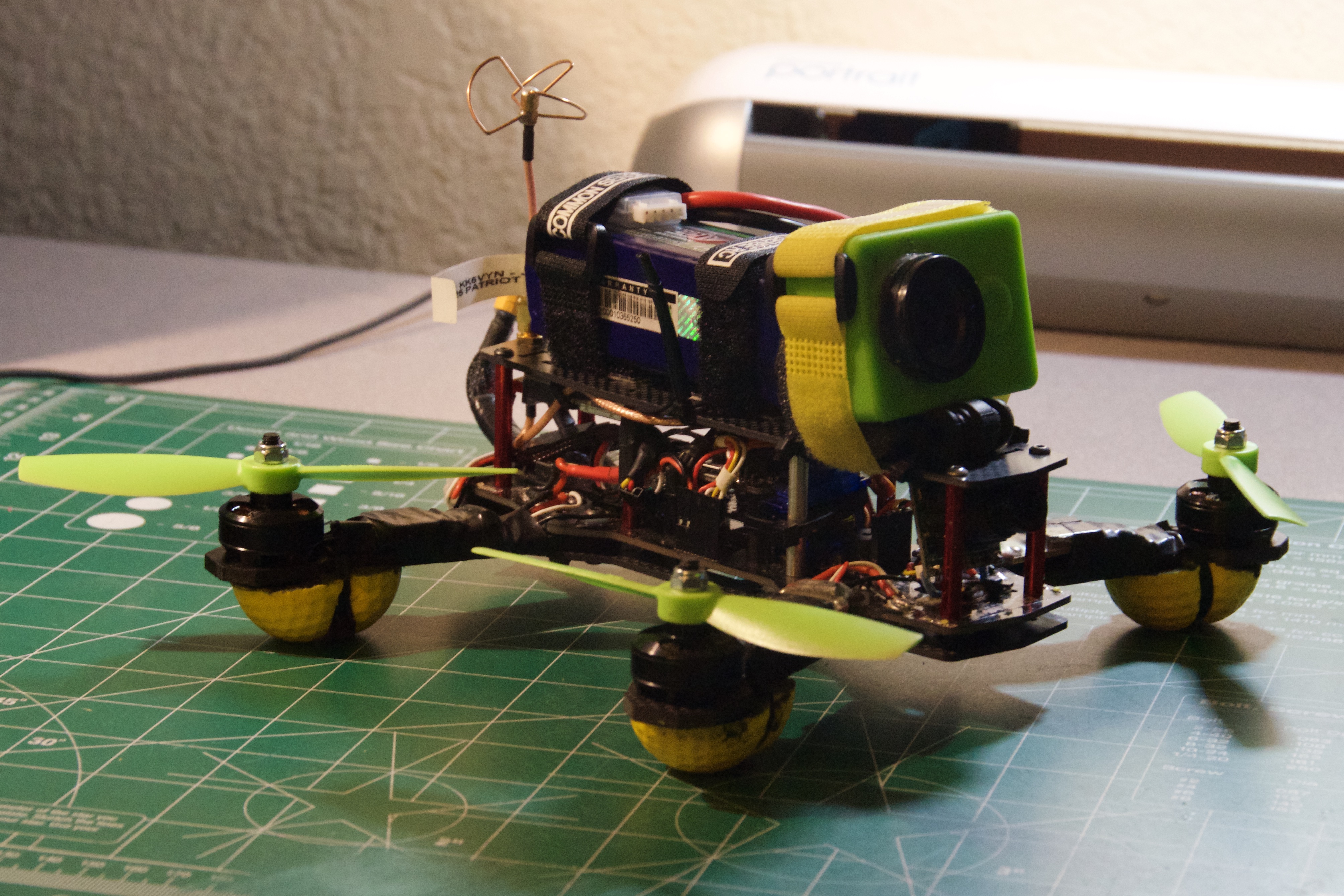
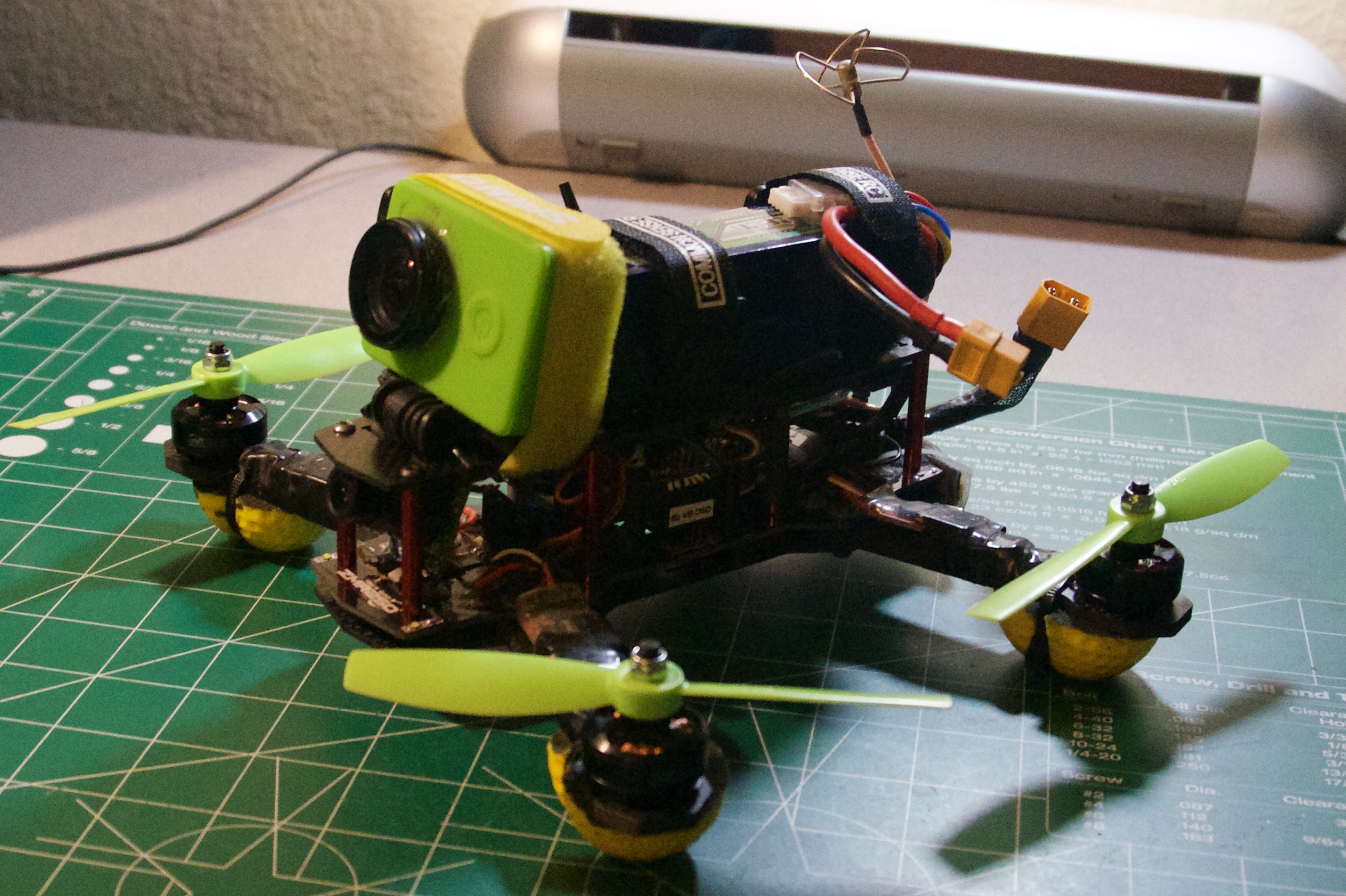
Build
- Frame + PDB: ZMR V2
- Flight Controller:Afroflight Naze32 Full with Betaflight 2.1.6
- Motors: Cobra CM-2204 1960kv
- ESCs: Lumenier 12 amp ESC w/ SimonK AutoShot
- Radio: FrSky D4R-II
FPV
- Video TX: Immersion RC 600mW 5.8GHz
- FPV Camera: RunCam PZ0420M-L28-R
- OSD: MinimOSD with MultiWii firmware
Misc
- Battery: 4S LiPo MultiStar Race Spec 4S 1400mAh 40-80C or Turnigy nano-tech 2200mah 4S 45~90C
- Propellers: Usually 5045BN DAL, sometimes 5045BN HQ or Gemfan
- HD Camera: GoPro Hero4 Black or Xiaomi Yi
PIDs
LuxFloat PID Controller
set pid_controller = LUX set p_pitch = 40 set i_pitch = 30 set d_pitch = 23 set p_roll = 40 set i_roll = 30 set d_roll = 23 set p_yaw = 100 set i_yaw = 50 set d_yaw = 12 set p_pitchf = 2.800 set i_pitchf = 0.580 set d_pitchf = 0.055 set p_rollf = 2.200 set i_rollf = 0.350 set d_rollf = 0.030 set p_yawf = 5.500 set i_yawf = 0.500 set d_yawf = 0.012 set level_horizon = 6.000 set level_angle = 6.000 set sensitivity_horizon = 75 set p_alt = 50 set i_alt = 0 set d_alt = 0 set p_level = 50 set i_level = 50 set d_level = 100 set p_vel = 120 set i_vel = 45 set d_vel = 1 set gyro_soft_lpf = ON set dterm_cut_hz = 40 set yaw_pterm_cut_hz = 50 # dump rates # rateprofile rateprofile 0 set rc_rate = 90 set rc_expo = 70 set rc_yaw_expo = 20 set thr_mid = 50 set thr_expo = 0 set roll_rate = 50 set pitch_rate = 50 set yaw_rate = 35 set tpa_rate = 40 set tpa_breakpoint = 1500
Media