Build
- Frame: Tweaker 180
- PDB: CC3D PDB (5v, 12v BECs)
- Flight Controller: SPRacingF3 with Betaflight 2.1.6
- Motors: DYS BE1806 2300KV
- ESCs: Lumenier 12 amp ESC w/ SimonK AutoShot (Damped Light and Oneshot enabled)
- Radio: FrSky d4r-ii
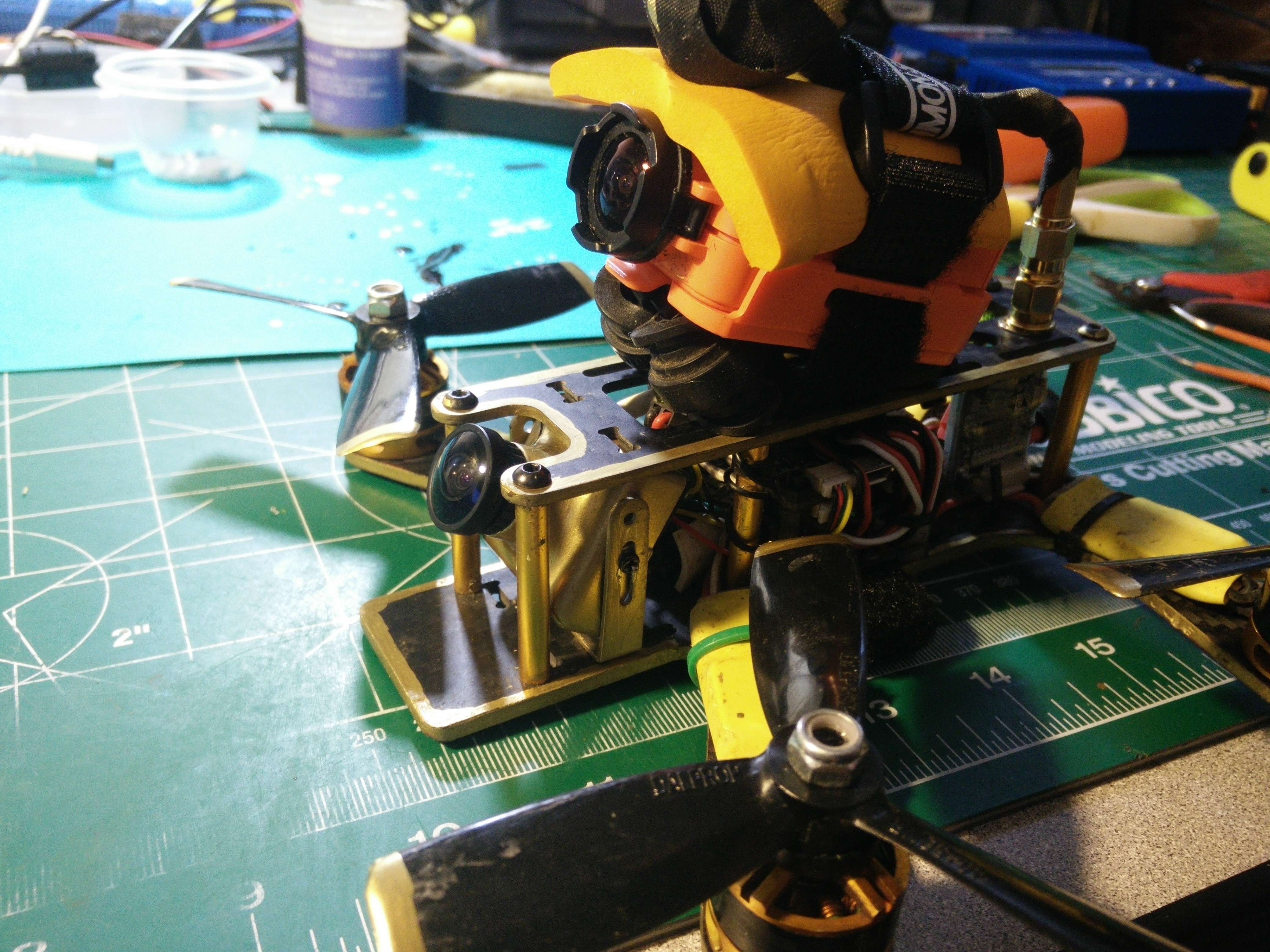
FPV
- Video TX: Eachine ET600 5.8G 32CH 600mW
- FPV Camera: Runcam SKYPLUS
- OSD: MinimOSD with MultiWii firmware
Misc
- Battery: 4S LiPo MultiStar Race Spec 4S 1400mAh 40-80C or Lumenier 1000mAh 60C, 1300mAh 60C, 1500mAh 45CV
- Propellers: Usually 4045BN DAL or tri-blade
- HD Camera: Runcam2
PIDs
LuxFloat PID Controller
set pid_controller = LUX set p_pitch = 40 set i_pitch = 30 set d_pitch = 18 set p_roll = 40 set i_roll = 30 set d_roll = 18 set p_yaw = 100 set i_yaw = 50 set d_yaw = 10 set p_pitchf = 1.700 set i_pitchf = 0.500 set d_pitchf = 0.015 set p_rollf = 1.500 set i_rollf = 0.500 set d_rollf = 0.013 set p_yawf = 5.000 set i_yawf = 0.300 set d_yawf = 0.005 set level_horizon = 6.000 set level_angle = 6.000 set sensitivity_horizon = 75 set p_alt = 50 set i_alt = 0 set d_alt = 0 set p_level = 50 set i_level = 50 set d_level = 100 set p_vel = 120 set i_vel = 45 set d_vel = 1 set gyro_soft_lpf = ON set dterm_cut_hz = 40 set yaw_pterm_cut_hz = 50 # dump rates # rateprofile rateprofile 0 set rc_rate = 90 set rc_expo = 80 set rc_yaw_expo = 20 set thr_mid = 50 set thr_expo = 0 set roll_rate = 60 set pitch_rate = 60 set yaw_rate = 45 set tpa_rate = 33 set tpa_breakpoint = 1500
Media